上QQ阅读APP看书,第一时间看更新
1.2 环境感知的对象
智能网联汽车环境感知的对象就是智能传感器检测的对象和V2X通信技术传递的信息,主要包括车辆的行驶路径、车辆周围的交通参与者、驾驶状态和驾驶环境等。
1.行驶路径
行驶道路分为结构化道路和非结构化道路。结构化道路的行驶路径主要检测行驶车辆的两侧车道线和各种车道标线;非结构化道路的行驶路径主要检测车辆的可行驶区域。
2.车辆周围的交通参与者
车辆周围的交通参与者主要包括行驶车辆周围的其他车辆、行人,地面上可能影响车辆通过和安全行驶的其他各种移动或静止物体,各种交通标志和交通信号灯等。
3.驾驶状态
驾驶状态主要包括驾驶员自身状态、车辆自身行驶状态和车辆周围其他车辆行驶状态。
4.驾驶环境
驾驶环境主要包括路面状况、道路交通拥堵情况和天气状况等。
智能网联汽车最主要的感知对象有车辆、行人、交通标志、交通信号灯和车道标线,其中车辆和行人既有运动状态,也有静止状态。对于运动的对象,除了要识别以外,一般还要进行跟踪。
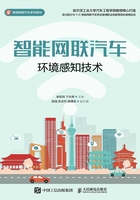
图1-6所示为城市工况下的环境感知对象,主要有静止目标、运动目标、道路标线、车道标线、交通信号灯和交通标志。
由此可见,环境感知的对象有静止的,如道路、静止的障碍物、交通标志和交通信号灯;也有移动的,如车辆、行人和移动的障碍物。对于移动的目标,不仅要检测,还要对其轨迹(位置)进行追踪,并根据追踪结果预测该目标下一步的轨迹(位置)。

图1-6 城市工况下的环境感知对象