上QQ阅读APP看本书,新人免费读10天
设备和账号都新为新人
3.1 场景抽象分级
为了描述交通事件的演变,我们需要考虑环境的快照,称之为Scene(即情景)。Scene包含环境、静态和动态交通要素、所有行动者和观察者的表现,以及这些实体之间的关系。与Scene不同,Scenario(即场景)描述的是时间跨度。场景是对一系列情景随着时间推移的演变的描述。为了描述场景的时间发展,我们使用了行动和事件以及相关参与者的目的地和对应的参数值,而场景的描述也可以根据需求和应用目的的不同而分成不同的层级。
2018年,德国PEGASUS项目提出了场景三层抽象分级,即功能场景、逻辑场景、具体场景,并在全球范围内获得了行业的一致认同,逐渐成为行业通用的场景分级标准。然而从2018年至今,人们在该分级模型的应用实践中发现,三层分级模型对于当前的驾驶场景工程应用,尤其是在仿真工程应用中渐渐显露出它的局限性。因此,2021年,由PEGASUS的后续项目VVM(Verificationand Validation Method)中的专家提出了场景四层抽象分级模型概念,在三层分级模型的基础上,新增了抽象场景这一层级,并被ISO 34501采纳,纳入了国际标准体系。
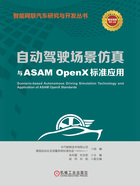
图3-1展示了场景四层抽象分级模型及其之间的关系,按照功能场景—抽象场景—逻辑场景—具体场景的顺序,抽象化程度逐渐降低,但场景数量逐渐增加。接下来的各小节,将对四层模型的概念进行展开介绍。

图3-1 场景四层抽象分级模型及其关系