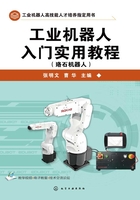
一个完整的机器人系统包括机器人本体、控制器、示教器、连接电缆、软件、末端执行器及其他附件,因此在运行机器人之前,首先要了解机器人的连接方式,XB4机器人系统连接示意图如图2-12所示。
图2-12 机器人系统连接示意图