2.1 数学建模
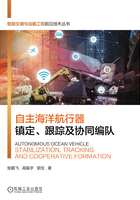
研究AMV的运动,首先建立AMV运动坐标系,坐标系一般选用惯性坐标系{E}(即OEXEYEZE)及固定于航行器质心的附体坐标系{B}(即ObXbYbZb)。坐标系和符号的定义如图2-1和表2-1所示。对于海洋航行器的运动,一般需要6个独立的自由度来描述航行器的位置和姿态,即随着附体坐标系中3个坐标轴移动和转动运动。移动运动(即位置)包括纵荡x、横荡y和垂荡z,以前进速度u、横漂速度v及垂荡速度ω表示沿x、y、z轴的速度、转动运动(即姿态)包括横摇φ、纵摇θ、艏摇ψ,以横摇角速度p、纵摇角速度q及艏摇角速度r表示航行器的姿态及沿x、y、z轴的旋转角速度。在惯性坐标系{E}中,OE为坐标系的原点,可取海平面或地面上任一点,OEZE指向地心,OEXE及OEYE位于水平面,且互相垂直;在附体坐标系{B}中,Ob一般选取航行器的质心,ObXb为纵轴指向航行器的前进方向,ObYb为横轴指向航行器的侧推方向,ObZb为垂向轴指向航行器的下沉方向。

图2-1 惯性坐标系及附体坐标系
表2-1 AMV各状态变量符号表示

(续)

2.1.1 AMV水平面运动数学模型
忽略垂向、横摇和纵摇运动,AMV水平面运动数学模型为[73,83-85]

其中,η=[x,y,ψ]T∈R3,表示惯性坐标系{E}下AMV的位置及航向角;υ=[u,v,r]T∈R3为AMV在附体坐标系{B}下的速度向量;τ=[τu,τv,τr]T∈R3为控制输入,其中,τu为前进控制,τv为横移控制力,τr为艏摇控制力矩;τw=[τwu,τwv,τwr]T∈R3表示在附体坐标系{B}下由风、浪、流引起的环境干扰;R(ψ)为旋转矩阵且具有R-1(ψ)=RT(ψ);M=MT∈R3×3>0为包括附加质量的非奇异对称正定惯性矩阵;C(υ)∈R3×3为科里奥利及向心力矩阵;D(υ)∈R3×3为水动力阻尼矩阵。它们具体形式分别为

上述矩阵中

其中,m为AMV质量;Xu,X|u|u,Yv,Y|v|v,Y|r|v,Yr,Y|v|r,Y|r|r, ,Nv,Nv|v|,N|r|v,Nr,N|r|r及N|v|r是线性二次阻力系数;
,Nv,Nv|v|,N|r|v,Nr,N|r|r及N|v|r是线性二次阻力系数; 为附加质量;xg为X轴上重心远离中心距离;Iz为垂直轴的转动惯量。
为附加质量;xg为X轴上重心远离中心距离;Iz为垂直轴的转动惯量。
惯性矩阵M中含有非对角线项m23,这是由于AMV顶端与尾端不对称导致。由于m23的存在可以看出横漂动态受艏摇转矩的影响[86]。
2.1.2 AMV三维运动数学模型
固定姿态下AMV三维运动数学模型为[80,87]

其中,p=[x,y,z]T∈R3为位置矢量;Θ=[φ,θ,ψ]T∈R3为姿态矢量;υ=[u,v,ω]T∈R3为速度矢量;τ=[τu,τv,τω]T∈R3为控制输入;τw=[τwu,τwv,τwω]T∈R3为由风、浪、流引起的环境干扰。M、D(υ)和g(Θ)分别为惯性矩阵、阻尼矩阵及恢复力矢量,具体形式如下:

为了描述简单,令sa=sina,ca=cosa。J(Θ)为
